This translation is community contributed and may not be up to date. We only maintain the English version of the documentation. Read this manual in English
Resolvendo colisões cinemáticas
Usar objetos de colisão cinemáticos exige que você resolva colisões por conta própria e mova os objetos como reação. Uma implementação ingênua para separar dois objetos em colisão se parece com isto:
function on_message(self, message_id, message, sender)
-- Trata colisão
if message_id == hash("contact_point_response") then
local newpos = go.get_position() + message.normal * message.distance
go.set_position(newpos)
end
end
Esse código separará seu objeto cinemático de outro objeto de física que ele penetra, mas a separação frequentemente passa do ponto e você verá jitter em muitos casos. Para entender melhor o problema, considere o seguinte caso em que um personagem do jogador colidiu com dois objetos, A e B:
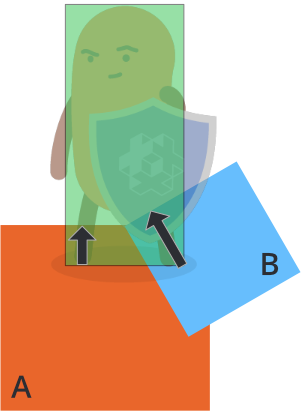
A engine de física enviará várias mensagens "contact_point_response", uma para o objeto A e uma para o objeto B, no frame em que a colisão ocorre. Se você mover o personagem em resposta a cada penetração, como no código ingênuo acima, a separação resultante seria:
- Mover o personagem para fora do objeto A de acordo com sua distância de penetração (a seta preta)
- Mover o personagem para fora do objeto B de acordo com sua distância de penetração (a seta preta)
A ordem dessas operações é arbitrária, mas o resultado é o mesmo de qualquer forma: uma separação total que é a soma dos vetores de penetração individuais:
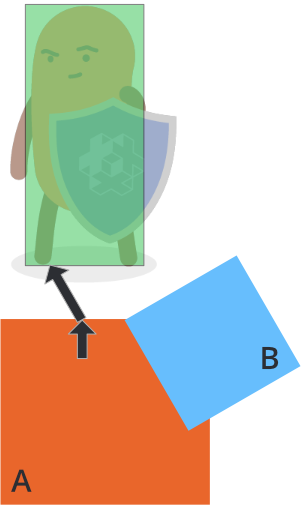
Para separar corretamente o personagem dos objetos A e B, você precisa tratar a distância de penetração de cada ponto de contato e verificar se separações anteriores já resolveram a separação, total ou parcialmente.
Suponha que a primeira mensagem de ponto de contato venha do objeto A e que você mova o personagem para fora pelo vetor de penetração de A:
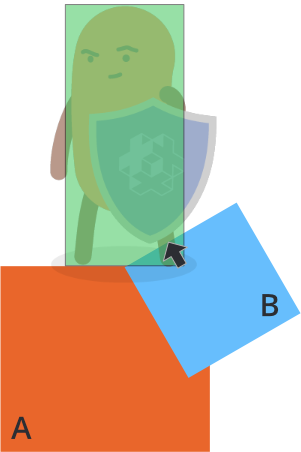
Então o personagem já foi parcialmente separado de B. A compensação final necessária para realizar a separação completa do objeto B é indicada pela seta preta acima. O comprimento do vetor de compensação pode ser calculado projetando o vetor de penetração de A sobre o vetor de penetração de B:
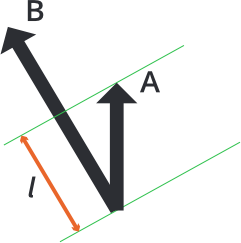
l = vmath.project(A, B) * vmath.length(B)
O vetor de compensação pode ser encontrado reduzindo o comprimento de B por l. Para calcular isso para um número arbitrário de penetrações, você pode acumular a correção necessária em um vetor para cada ponto de contato, começando com um vetor de correção de comprimento zero:
- Projete a correção atual contra o vetor de penetração do contato.
- Calcule qual compensação resta do vetor de penetração (conforme a fórmula acima).
- Mova o objeto pelo vetor de compensação.
- Adicione a compensação à correção acumulada.
Uma implementação completa se parece com isto:
function init(self)
-- vetor de correção
self.correction = vmath.vector3()
end
function update(self, dt)
-- redefine a correção
self.correction = vmath.vector3()
end
function on_message(self, message_id, message, sender)
-- Trata colisão
if message_id == hash("contact_point_response") then
-- Obtém as informações necessárias para sair da colisão. Podemos
-- receber vários pontos de contato de volta e ter que calcular
-- como sair de todos eles acumulando um
-- vetor de correção para este frame:
if message.distance > 0 then
-- Primeiro, projeta a correção acumulada sobre
-- o vetor de penetração
local proj = vmath.project(self.correction, message.normal * message.distance)
if proj < 1 then
-- Considera apenas projeções que não passam do ponto.
local comp = (message.distance - message.distance * proj) * message.normal
-- Aplica compensação
go.set_position(go.get_position() + comp)
-- Acumula a correção feita
self.correction = self.correction + comp
end
end
end
end