This translation is community contributed and may not be up to date. We only maintain the English version of the documentation. Read this manual in English
Разрешение кинематических столкновений
Использование кинематических объектов столкновений требует от вас самостоятельно принимать решения на основе столкновений и двигать объекты в качестве реакции. Простейшая реализация разделения двух сталкивающихся объектов выглядит следующим образом:
function on_message(self, message_id, message, sender)
-- Обработать столкновение
if message_id == hash("contact_point_response") then
local newpos = go.get_position() + message.normal * message.distance
go.set_position(newpos)
end
end
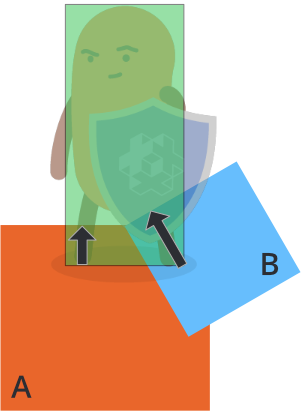
Данный код отделяет кинематический объект от другого объекта, в который тот проникает, но такое разделение часто промахивается и вы можете увидеть дребезг во многих случаях. Чтобы лучше понять суть проблемы, представьте следующий сценарий, где игровой персонаж столкнулся с двумя объектами, A и B:
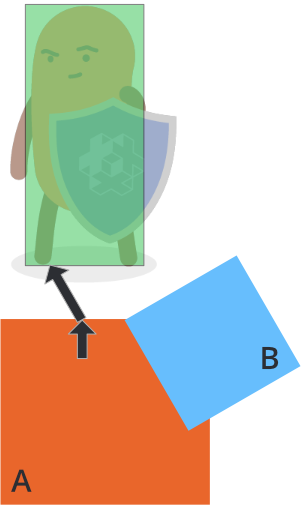
Физический движок пошлет несколько сообщений "contact_point_response", одно для объекта A и одно для объекта B, в том кадре, где произошло столкновение. Если вы подвинете персонажа в ответ на каждое проникновение, как в коде выше, результирующее разделение будет следующим:
- Подвинуть персонажа вне объекта A согласно его расстоянию проникновения (черная стрелка)
- Подвинуть персонажа вне объекта B согласно его расстоянию проникновения (черная стрелка)
Порядок этих действий случаен, но результат будет одинаковым в обоих случаях: итоговое разделение, которое является суммой отдельных векторов проникновения:
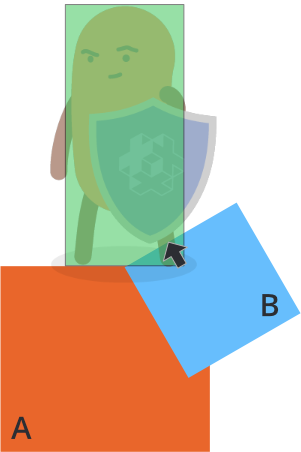
Чтобы надлежащим образом отделить персонажа от объектов A и B, вам нужно обработать расстояние проникновения для каждой точки контакта и проверить, не привели ли уже предыдущие действия, полностью или частично, к нужному разделению.
Предположим, что первое сообщение контакта приходит от объекта A и вы двигаете персонажа наружу из A по его вектору проникновения:
Далее персонаж уже был частично отделен от B. Необходимое окончательное компенсирование, которое нужно применить для полного отделения от объекта B, обозначено черной стрелкой выше. Длина компенсирующего вектора может быть вычислена проекцией вектора проекции A на вектор проекции B:
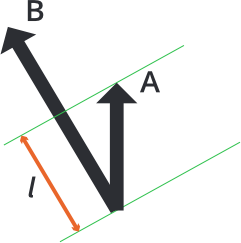
l = vmath.project(A, B) * vmath.length(B)
Компенсирующий вектор может быть найден сокращением длины B на l. Для таких вычислений для произвольного количества проникновений, вы можете накапливать необходимую коррекцию в векторе, для каждой точки контакта, начав с вектора коррекции нулевой длины:
- Спроецируйте текущую коррекцию на вектор проникновения контакта.
- Вычислите, сколько компенсации еще осталось от вектора проникновения (согласно формуле выше)
- Сдвиньте объект по вектору компенсации.
- Добавьте компенсацию к накопленной коррекции.
Окончательная реализация выглядит следующим образом:
function init(self)
-- корректирующий вектор
self.correction = vmath.vector3()
end
function update(self, dt)
-- сброс корректирующего вектора
self.correction = vmath.vector3()
end
function on_message(self, message_id, message, sender)
-- Обработка столкновения
if message_id == hash("contact_point_response") then
-- Получить информацию, необходимую для убирания из столкновения. Мы можем
-- получить несколько точек соприкосновения и должны вычислить
-- как выбраться из всех них накапливая
-- корректирующий вектор в этом кадре:
if message.distance > 0 then
-- Во-первых, получим проекцию накопленной коррекции на
-- вектор проникновения
local proj = vmath.project(self.correction, message.normal * message.distance)
if proj < 1 then
-- Заботимся только о проекциях, которые не выходят за пределы диапазона.
local comp = (message.distance - message.distance * proj) * message.normal
-- Применяем компенсацию
go.set_position(go.get_position() + comp)
-- Прибавляем проделанную коррекцию
self.correction = self.correction + comp
end
end
end
end