This translation is community contributed and may not be up to date. We only maintain the English version of the documentation. Read this manual in English
Rozwiązywanie kolizji kinematycznych
Korzystanie z kinematic collision objects wymaga ręcznego rozwiązywania kolizji i przesuwania obiektów w reakcji na nie. Naive implementation, czyli proste podejście do rozdzielenia dwóch kolidujących obiektów, wygląda tak:
function on_message(self, message_id, message, sender)
-- Obsługa kolizji
if message_id == hash("contact_point_response") then
local newpos = go.get_position() + message.normal * message.distance
go.set_position(newpos)
end
end
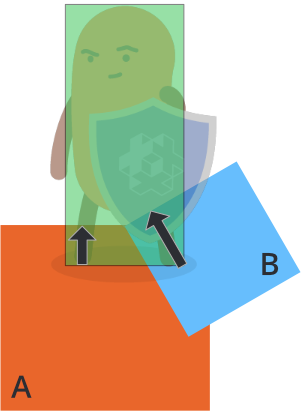
Ten kod odsunie kinematic object od innych obiektów fizycznych, w które wchodzi, ale takie rozdzielenie często jest zbyt duże i w wielu przypadkach powoduje drgania. Żeby lepiej zrozumieć problem, rozważ następującą sytuację, w której postać gracza zderza się z dwoma obiektami, A i B:
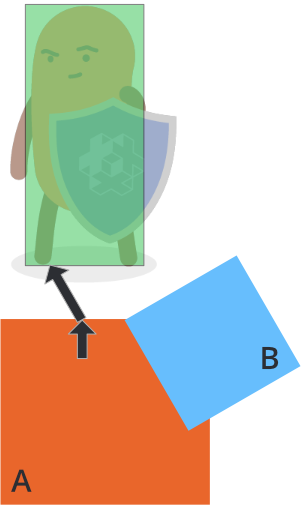
Silnik fizyki wyśle wiele wiadomości "contact_point_response": jedną dla obiektu A i jedną dla obiektu B w klatce, w której doszło do kolizji. Jeśli przesuniesz postać w odpowiedzi na każde przeniknięcie, tak jak w prostym kodzie powyżej, rozdzielenie będzie wyglądało tak:
- Przesuń postać poza obiekt A zgodnie z jego odległością penetracji (czarna strzałka).
- Przesuń postać poza obiekt B zgodnie z jego odległością penetracji (czarna strzałka).
Kolejność tych działań jest dowolna, ale wynik będzie taki sam w obu przypadkach: całkowite rozdzielenie, które stanowi sumę wektorów penetracji poszczególnych obiektów:
Aby poprawnie odsunąć postać od obiektów A i B, trzeba uwzględnić odległość penetracji każdego punktu kontaktowego i sprawdzić, czy któreś z wcześniejszych przesunięć nie rozwiązało już częściowo albo całkowicie problemu.
Załóżmy, że pierwsza wiadomość o punkcie kontaktowym pochodzi od obiektu A i przesuwasz postać poza obiekt A zgodnie z jego wektorem penetracji:
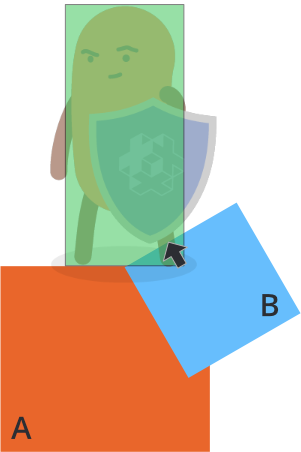
Wtedy postać jest już częściowo odsunięta od obiektu B. Ostateczna korekta potrzebna do pełnego oddzielenia od obiektu B jest wskazana czarną strzałką powyżej. Długość wektora kompensacji można obliczyć, rzutując wektor penetracji A na wektor penetracji B:
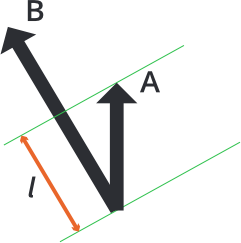
l = vmath.project(A, B) * vmath.length(B)
Wektor kompensacji można wyznaczyć, skracając długość B o l. Aby obliczyć to dla dowolnej liczby przeniknięć, można akumulować potrzebną korektę w wektorze, który na początku ma zerową długość:
- Oblicz projekcję bieżącej korekty na wektor penetracji kontaktu.
- Wyznacz, ile kompensacji pozostaje z wektora penetracji, zgodnie z powyższym wzorem.
- Przesuń obiekt o wektor kompensacji.
- Dodaj kompensację do skumulowanej korekty.
Pełna implementacja wygląda tak:
function init(self)
-- Wektor korekty
self.correction = vmath.vector3()
end
function update(self, dt)
-- Zresetuj wektor korekty
self.correction = vmath.vector3()
end
function on_message(self, message_id, message, sender)
-- Obsługa kolizji
if message_id == hash("contact_point_response") then
-- Pobierz informacje potrzebne do wyjścia z kolizji. Możemy
-- dostać kilka punktów kontaktowych i musimy obliczyć,
-- jak wycofać się ze wszystkich z nich, akumulując korektę
-- dla tej klatki:
if message.distance > 0 then
-- Najpierw sprawdź projekcję skumulowanej korekty na
-- wektor penetracji
local proj = vmath.project(self.correction, message.normal * message.distance)
if proj < 1 then
-- Bierz pod uwagę tylko projekcje, które nie są zbyt duże.
local comp = (message.distance - message.distance * proj) * message.normal
-- Zastosuj kompensację
go.set_position(go.get_position() + comp)
-- Skumuluj zastosowaną korektę
self.correction = self.correction + comp
end
end
end
end